
Hi, I'm Dimitrios Bouzoulas.
Robotics Engineering | Autonomous Systems | CAD Design
Welcome to my personal portfolio. Here you'll find my latest projects, interact with CAD models, and get insights into my engineering journey.
Shortly about me: I'm a PhD researcher at Aalto University focusing on autonomous vehicle perception in adverse weather conditions. My primary interests lie in robotics, more specifically how they perceive the world and how can they make decisions based on that information.
Current work:
Work: Currently I am actively working on applying an automated labelling pipeline for low-light pedestrian detection on a research vehicle.
Personal projects: I am making a turtlebot robot from scrach, I aim to publish it as a cheapepr alternative to existing solutions, and additionally use it for my robotics related experiments.
Signature CAD build:
Recent Work
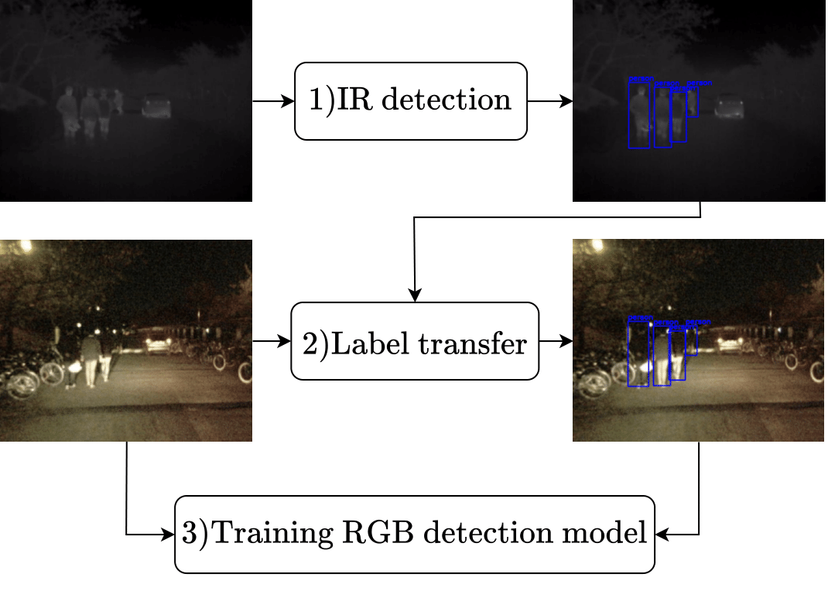
Research: Low-Light Pedestrian Detection
Developed and a pipeline for automated pedestrian labeling in low-light conditions using thermal and RGB image pairs.
Explore Project →
Hackathon: Drone Tracking and Trajectory Prediction
During Junction 2025 our team developed a system for drone detection, tracking, and propeller RPM measurement using raw event camera footage.
Explore Project →
Hackathon: 3D Object Reconstruction
Using a webcam, a robotic arm, and a rotating base, for data gathering, structure from motion was used to create 3D models of objects.
Explore Project →Work Experience
Aalto University: PhD Researcher
Working on autonomous vehicle perception in adverse weather conditions. Current research targets automated labelling in low-light conditions implemented on a real research vehicle.
From ~August 2025 to present.
Master's thesis worker:
From ~November 2024 to ~August 2025.
KTH Royal Institute of Technology: Exchange Researcher
Worked on applying and testing optimization algorithms evaluating real time compliance on moving-horizon and simultaneous input-and-state estimation problems.
From ~August 2024 to ~October 2024.
Novia University: Project Researcher (Machine Learning)
Worked on perception, machine learning, and optimization tasks related to maritime applications. Contributed to the development ofMH-SISEandFMUiL.
From ~October 2022 to ~June 2025.

Abo Akademi: Embeded Systems Developer
Worked on the development and advancement of Abo Akademi's autonomous boat project 'Aboat'. \ improved existing autonomy stack, added tests, and developed an original dynamic positionining algorithm for the boat.
From ~March 2022 to ~October 2022.
University of Peloponnese: Lab Assistant
Assisted in experiments, 3D printing application, equipment maintenance and development of lab resources for material strength testing related applications.
From ~February 2019 to ~February 2022.
Competitions & Hackathons
Junction 2025
Placement: 1st
Our team developed a system for drone detection, tracking, and individual propeller RPM measurement using raw event camera footage.
Github: link
Aalto Robotics & AI Hackathon
Placement: - | Nomination won: "Best Github Repo"
Using a webcam, a robotic arm, and a rotating base, for data gathering, structure from motion was used to create 3D models of objects.
Github: link

Aalto Defense Hackathon
Placement: 3rd
Our team developed an app for real-time communication and resource sharing between civilians and government for times of crisis.
Github: confidential

Bosch future mobility challenge (BFMC) 2023
Placement: 6th/80
Role: Team leader
Our team developed an autonomous 1/10 scale vehicle autonomous capabilities. My responsibilities were coordinating the team and integrating componenets to the architecture. Main contributions: Location based navigation module, traffic logic module, sensor setup, object localization.
Github: confidential
Recent Publications (more on Google Scholar: link):
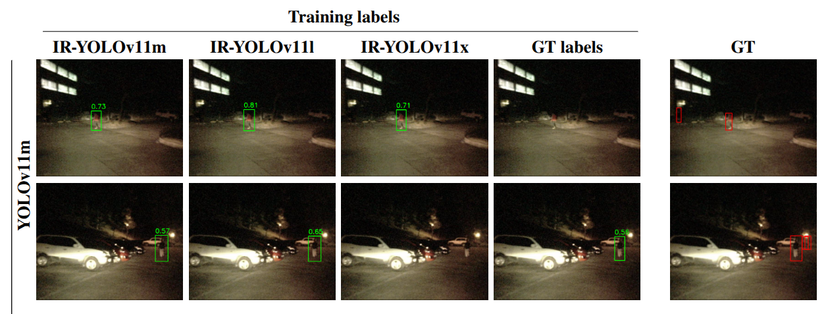
Automatic Labelling for Low-Light Pedestrian Detection
Using IR-RGB image pairs a pipeline was developed that is capable of producing labels for the RGB images that outperform ground truth labels in low-light pedestriand detection tasks in most cases
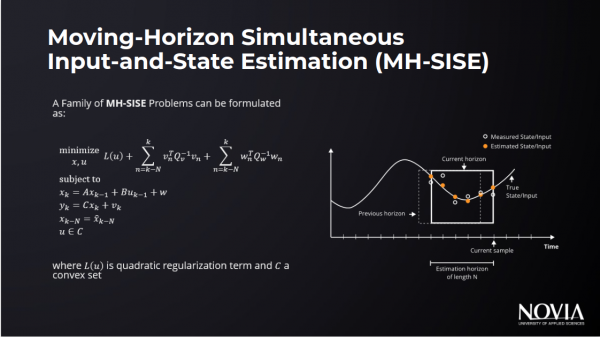
On the Real-Time Compliance of Moving-Horizon Simultaneous Input-and-State Estimation Problems
This paper evaluates whether moving-horizon simultaneous input-and-state estimation (MH-SISE) can meet strict real-time constraints for fast dynamical systems by using solver code generation instead of conventional numerical optimization.
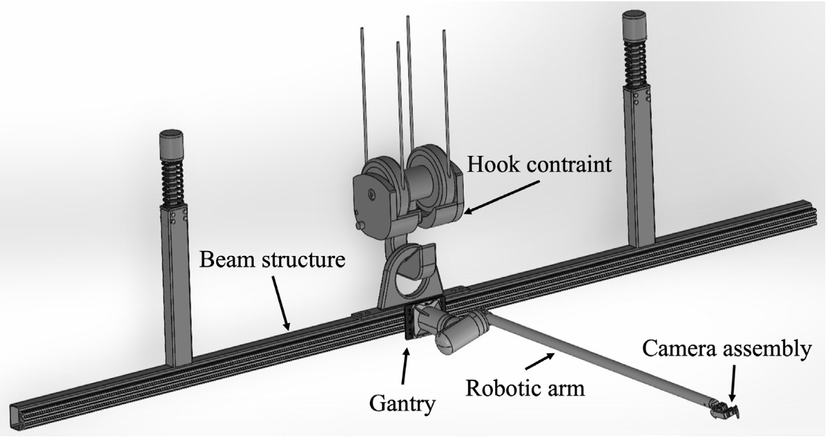
Overhead Crane Inspection Device
This study presents a portable overhead-crane inspection device that combines a robotic arm, web-based camera streaming, and a machine-learning audio pre-screening method to improve safety and reduce inspection time. In trials, it successfully inspected 14 of 20 target components without requiring a manlift, with future work proposed around OPC UA–based automation and expanding the dataset to strengthen ML performance.
Education:

MSc: Mechanical Engineering - Aalto University
GPA: 4.82/5
Acomplishments: Dean's List 2024 & 2025
Minor: Computer Science
Primary focus during the degree was autonomous mobile robotics. Involving a range of tasks, such as perception, state estimation, control, and system integration.

Summer School: Machine Learning on Representation Learning and Generative AI - Oxford University
Organized by: AI for Global Goals
The summer school covered a range of topics regarding generative AI and representation learning application in a diverse set of fields.
Summer School: Software design using C++ from the inventor of C++ - Aarhus University
The summer school went through a diverse range of topics regarding modern C++ software design and best practices taught by Bjarne Stroustrup, the inventor of C++.

BSc in Mechanical Engineering - University of Peloponnese
GPA: 7.8/10
Acomplishments: Highest GPA in my graduation class (Valedictorian equivelent)
Main focus: Embedded systems, Electronics, 3D printing applications, CAD design, and material strength testing.
Patents
Overhead Crane Inspection Device
The development of the device took place during the mechatronics project course at Aalto University, the device enables the remote inspection of overhead cranes, allows for data recording and has the ability to perform audio based evaluation of the crane using audio recordings.
Serial No. FI 20247053, Finnish Patent and Registration Office (Pending)